지난시간에 자율주행에 필수요소인 센서에 대한 간단한 개요를 알아보았다
이번에는 조금 더 세부적으로 센서 종류, 기능들을 설명해보고자 한다

위 그림과 같이 자율주행차량에는 카메라, 레이더, 라이다 총 3개의 대표적인 센서를 활용한다
사람의 눈과 가장 유사한 '카메라'
카메라는 사람에게 가장 익숙한 센서라고 생각할 수 있다
렌즈와 센서프레임을 이용하여 외부에서 들어오는 빛을 전기적신호로 변환하여 피사체를 촬영하는 기술이다
일반적인 카메라는 이미지파일로 출력하지만, 자율주행차량에서는 이미지가 아닌 계산에 용이하도록 2차원 배열형태로 변환한다
| 장점 | 단점 |
| CMOS 센서를 이용하여 해상도가 높음 | 높은 해상도로 인해 계산량이 많음 |
| 주변 환경에 대한 색상, 사물형태 등을 제공 | 정확한 거리측정, 차량 속도 등 상대적 계산에 취약함 |
| 다른 센서들 대비 저렴한 가격 | 날씨, 순간적인 밝기 변화에 둔감하며, 야간에 성능 저하 |
가장 보편화된 센서 '레이더'
레이더 센서는 자율주행차량이 아니더라도 현재 생산되고 있는 차량에 99%이상에 장착되는 가장 보편적인 장비다
내가 처음으로 경험했던 레이더 센서는 '후방주차보조센서'였다. 띠 띠 띠 거리면서 차량과 상대의 거리를 인지할 수 있도록 도와주는 기능
레이더 센서는 전자기파(RF)신호를 송출하여 목표물에 반사되어 돌아오는 수신파를 분석하는 기술이다
| 장점 | 단점 |
| 환경 변화에 강함(날씨, 밝기, 야간) | 횡방향에 물체 위치 측정 데이터가 정확하지 않음 |
| 거리 측정 정확도가 높음 | 지표면, 비, 바다 등 장애물로 인한 클러터 현상이 발생하여 탐지 방해 |
| 저렴한 가격 |
가장 정확한 측정이 가능한 '라이다'
라이다센서는 앞선 카메라, 레이더에 비하면 개발된 시기가 그리 길지 않다
고출력 펄스 레이저를 주기적으로 송출하는 구조를 가지고 있다
송신신호와 반사되어 돌아오는 수신신호의 시간차를 분석하여 3차원으로 공간을 스캐닝한다
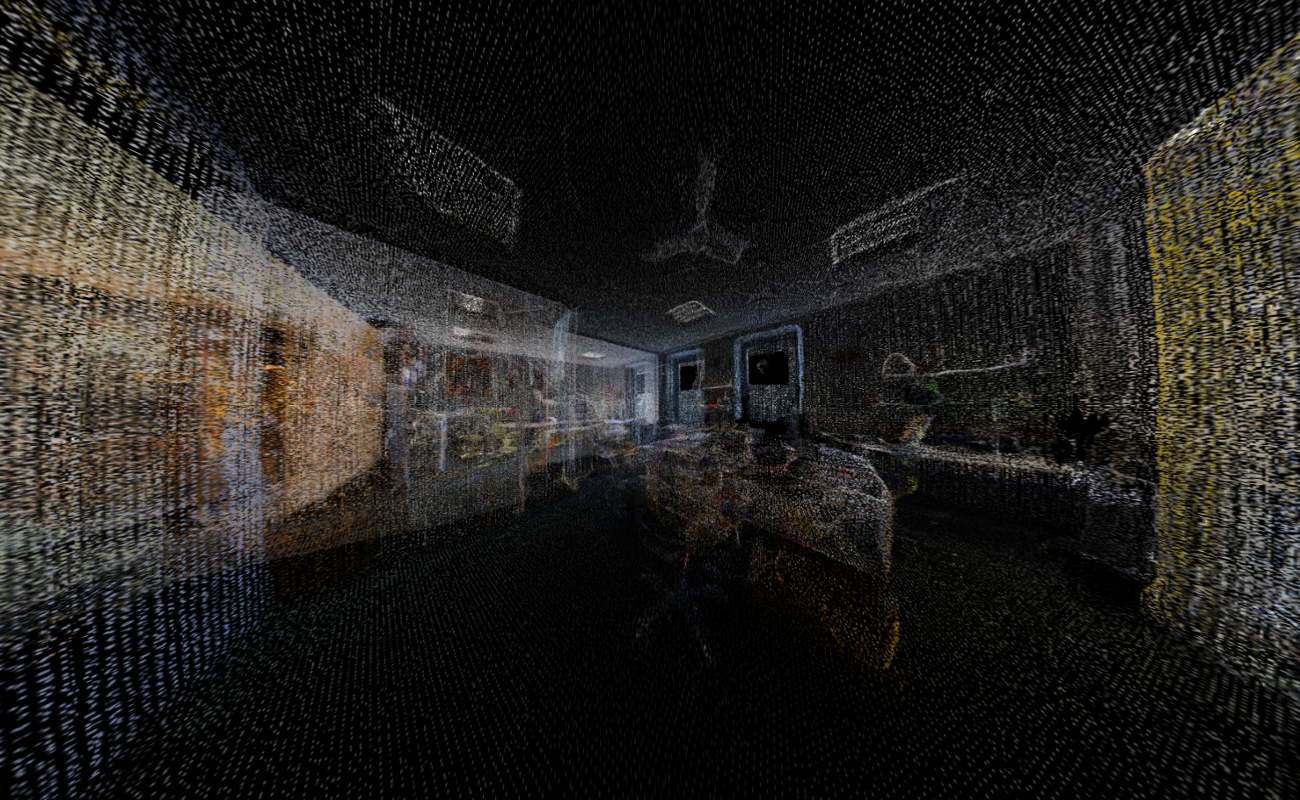
위 이미지가 바로 라이다를 이용하여 공간을 스캐닝한 것
수많은 점들로 공간을 구성하는 'point cloud'방식를 사용한다
아이폰 프로 모델에도 라이다센서를 장착하였는데, 카메라 센서가 구현하지 못하는 3차원적 계산을 도와주어 더 깊은 심도 연출을 돕는다
| 장점 | 단점 |
| 거리, 각도 등 측정 정확도가 매우 높음 | 습기가 있을 경우 신호 세기가 약해짐 |
| 날씨, 밝기등 환경변화에 매우 강함 | 매우 비싼 가격대 |
간단하게 각 센서별 기능과 특징을 알아보았다
여기서 확인할 수 있는 것은 각 센서가 가진 장점이 서로의 단점을 보완할 수 있다는 것을 볼 수 있다
H/W, S/W에 꾸준한 성능개발을 통해 스스로의 단점을 극복시키는 방법 또한 있다
그 대표적인 예가 '테슬라'이다
테슬라는 레이더, 라이다센서를 사용하지 않고 오로지 카메라센서만을 이용하여 자율주행기술을 개발하고 있다
특히 자체개발한 S/W를 이용하여 카메라센서가 탐지하지 못하는 거리측정도 가능하게 하였고, 밝기 변화에도 빠르게 대응할 수 있도록 개발하고 있다
하지만 아직 안정성을 입증받지 못하고 있는것이 현실.....
오차범위가 1cm도 채 안되는 라이다센서를 어떻게 이길지 궁금하다
'& 프로그래밍 > & SDC' 카테고리의 다른 글
| [H-모빌리티 클래스] 1차 중간평가 후기 (3) | 2022.02.18 |
|---|---|
| [자율주행 통합 인지시스템_1] 센서 개요 (0) | 2022.01.06 |
| [H-모빌리티 클래스] 수강할 과목이 너무 많다 (2) | 2022.01.03 |
| 네이버랩스 자율주행 오픈데이터셋 페이지 오픈 (0) | 2021.05.20 |
| 자율주행 기술(SSD: Single Shot Multibox Detector) (0) | 2021.05.20 |



