오늘은 매니퓰레이터(Manipulator)에 대해 학습했다. 로봇의 일종으로 이해할 수 있는데, 내 나름대로 관절로봇으로 이해했다. 로봇이 가진 관절의 특징을 구분지어서 여러가지 매니퓰레이터로 나눌 수 있는데 아래 사진처럼 크게 6가지 정도가 나온다
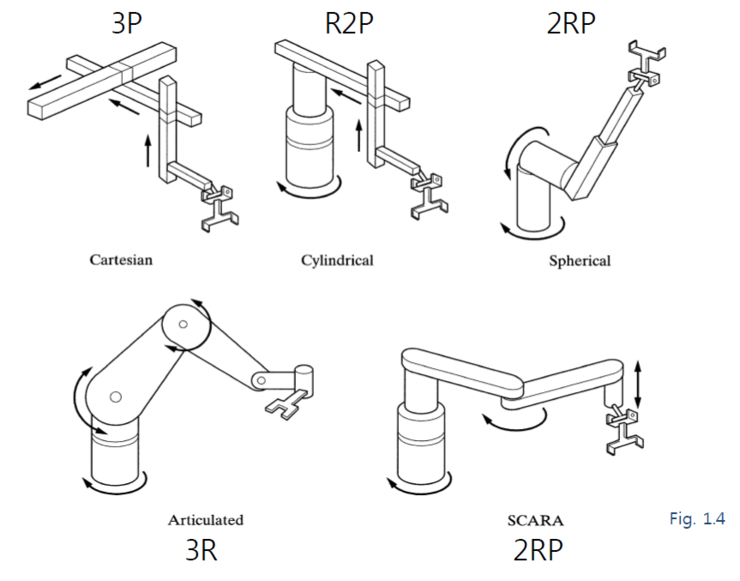
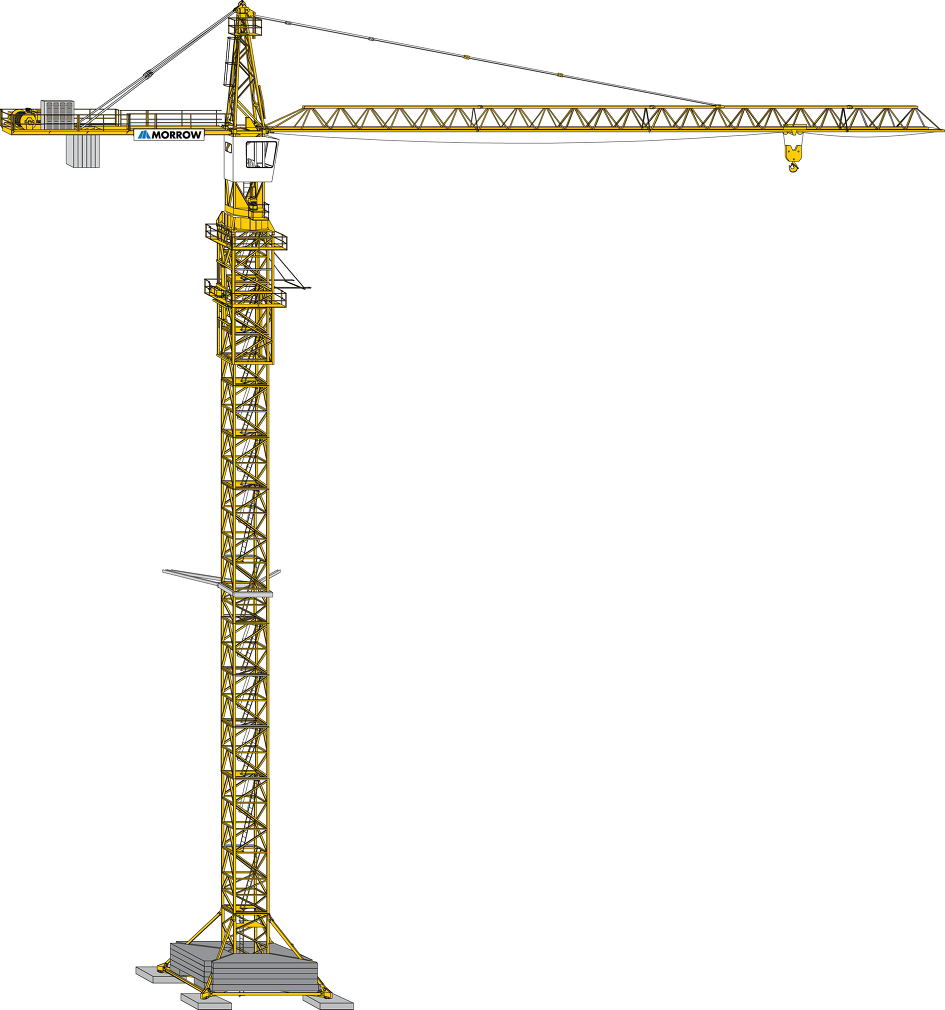
1. 원통형(cylindrical)
- 원통으로 생긴 link를 기준으로 수직,수평으로 물체를 이동시킬 수 있는 구조인데, 무거운 물체나 작업영역이 넓은 곳에서 주로 사용된다. 일상에서는 타워크레인이 대표적인 예라고 할 수 있을 것 같다
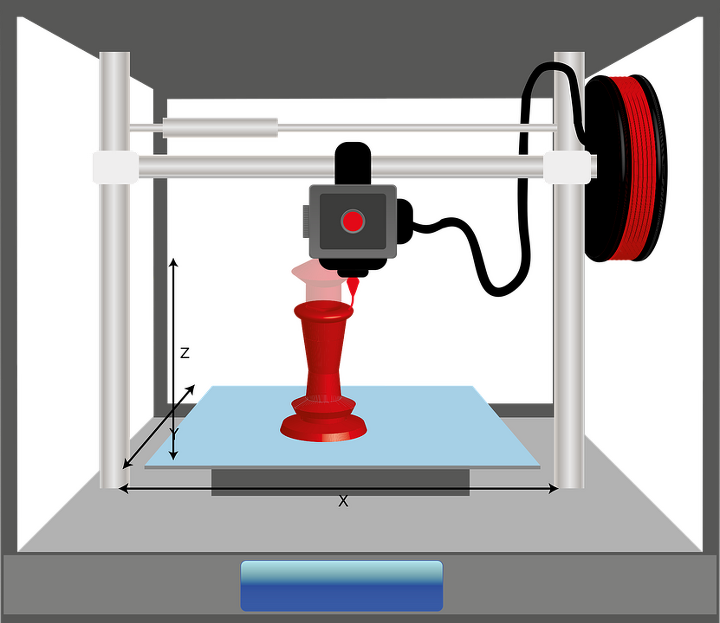
2. 직교형(Cartesian)
- 평면적으로 물체이동에 유리하고 세밀하고, 작업속도가 빠른 구조로, 항만에서 컨테이너를 옮기는 크레인, 실내 작업장에서 쓰이는 크레인, 최근에는 3D프린터가 이 직교형 디자인을 가지고 있다. 하지만 작업영역이 한정적이고, 한번 구조를 갖추고나면 쉽게 다른 곳으로 옮기기 어려워 유연성이 낮은편이기도 하다.
3. 구형(spherical)
- 관절구조가 원형(구체)로 되어있어 주로 휴머노이드 로봇을 제작할때 어깨관절에 많이 사용된다. 영화 스타워즈에서 나온 BB-8로봇이 대표적인 구형관절 로봇이라고 할 수 있다

4. 다관절형(Articulated)
- 기본적으로 3축이상 관절(joint)를 가지고 있는 구조로서, 많은 생산업체에서 사용되는 무인로봇이 대표적이다. 현대자동차 생산과정을 보면 차량의 기본 프레임을 용접하거나, 사람보다 빠르고 정확하게 처리할 수 있는 부분에서 매우 유용하게 사용된다

이처럼 다양한 매니퓰레이터를 제작하기 전에 가상공간에서 시뮬레이션을 할 수 있는 기능을 ROS에서 제공하는데, 바로 URDF를 이용한 모델링이다. 오늘 이 모델링 작업을 통해 원통형 매니퓰레이터 샘플을 제작해보았는데..... 진짜 ROS에 기초도 모르는 상태에서 갑자기 이런 과정을 나가버리니까 아무것도 모르겠더라.........
일단 완성은 했는데 내가 어떻게 완성을 시켰는지도 이해가 안갈정도.... 조금더 공부해보고 다음번에 풀이를 써봐야겠다
'& 프로그래밍 > & ROS' 카테고리의 다른 글
| ROS 메시지 통신 이해하기 (0) | 2021.06.08 |
|---|---|
| ROS 기본용어 정리 (0) | 2021.06.07 |
| ROS 개발환경 구축하기(melodic설치) (0) | 2021.06.07 |
| ROS 개발환경 구축하기(우분투/ROS설치) (2) | 2021.06.01 |
| 내가 ROS를 배우는 이유 (0) | 2021.05.31 |



